
 产品:41
产品:41

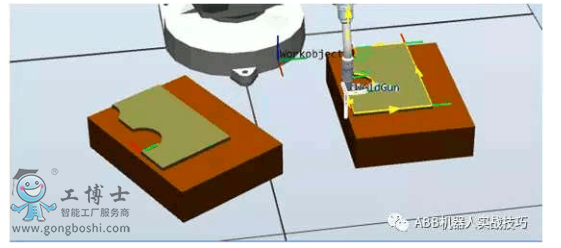
1)如果有下图两个产品,已经完成了右边产品轨迹,左边产品估计一样,如何快速生成左边轨迹(左边产品可能有平移和旋转)
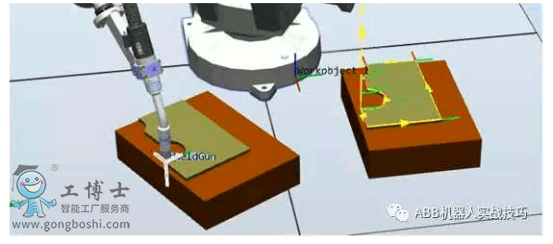
3)完成左边起点的示教, 为Target_ ref_ start, 如下图。
注:如果左边产品轨迹有旋转,示教的Target_ ref_ st ant相对于左边产品的姿态要和Target. 20相对于右
边产品的姿态-致(此处左边产品旋转了30° ,示教的角度z方向也旋转了30° )
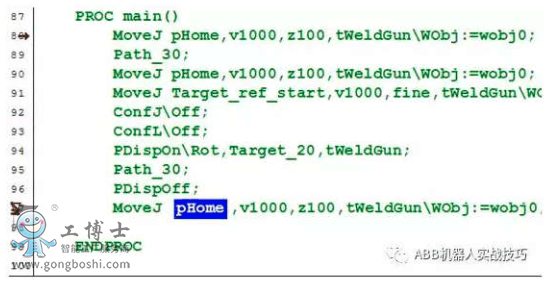
MoveJ pHome, v1000, z100, tWe ldGun \WObj :=wobj0://移动到Home位置
Path_ 30://运行右边产品轨迹
MoveJpHome, v1000, z100, tWel dGun{ WObj :=wobj0://回到Home
MoveJTarget_ ref_ start, v1000, fine, tWe ldGun wobj :=wob j0://走到左边产品起点
ConfJ\Off ://因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报
错ConfL\Off://因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报错
PDisp0n\Rot, Target_ 20, tWel dGun: //设定当前位置和Target_ 20的偏差关系(包括平移和旋转),因为此时机器人停在Target. ref_ start 起点,即设定左边轨迹和右边轨迹的整体偏移关系。使用\rot 表示平移和旋转均计算。如果不使用\rot,则只使用平移,旋转不计算
Path_ 30://运行原有轨迹,此时轨迹参考坐标移动关系,机器人实际走左边产品轨迹
PDispOff ://轨迹完成,关闭平移关系
MoveJ pHome, v1000, z100, tWeldGun \WObj :=wob j0:
2.单工位多次预约程序
1)机器人有程序如下
2)
机器人在home等待。有人按过di信号,机器人开始执行。人工可以一-次性多次预约,即如果人工一-次性
按过3次,机器人执行三次
4)我们通过中断来实现。
5)中断的意义为,机器人后台在不断扫描(类似PLC) ,和机器人前台运动不冲突。后台实时扫描到信号
就会去执行设定的中断程序,中断程序里没有运动指令,前台机器人不停,不影响运动
6)新建一个例行程序,取名tr_ 1,注意:类型选中断( trap)

来源:网络
更多资讯:abb机器人